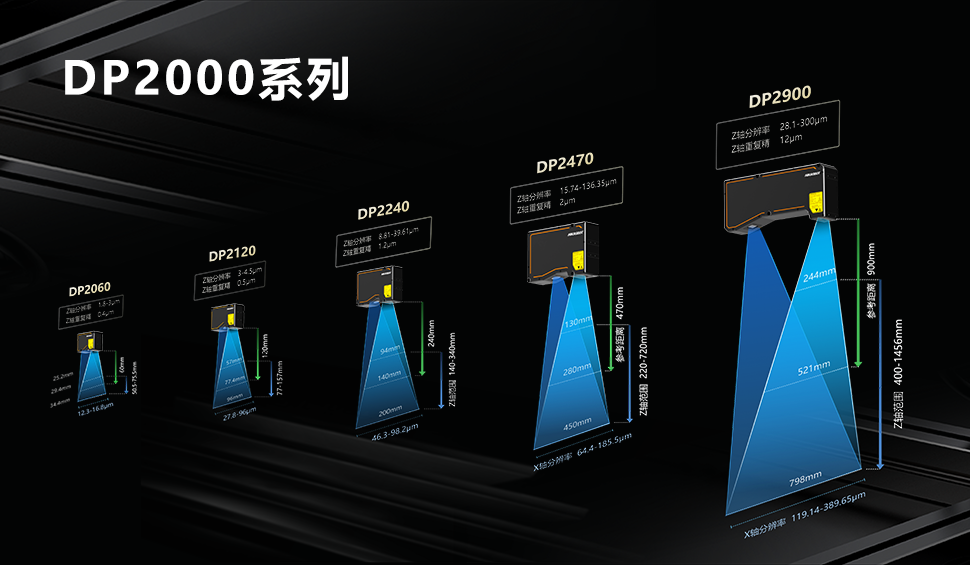
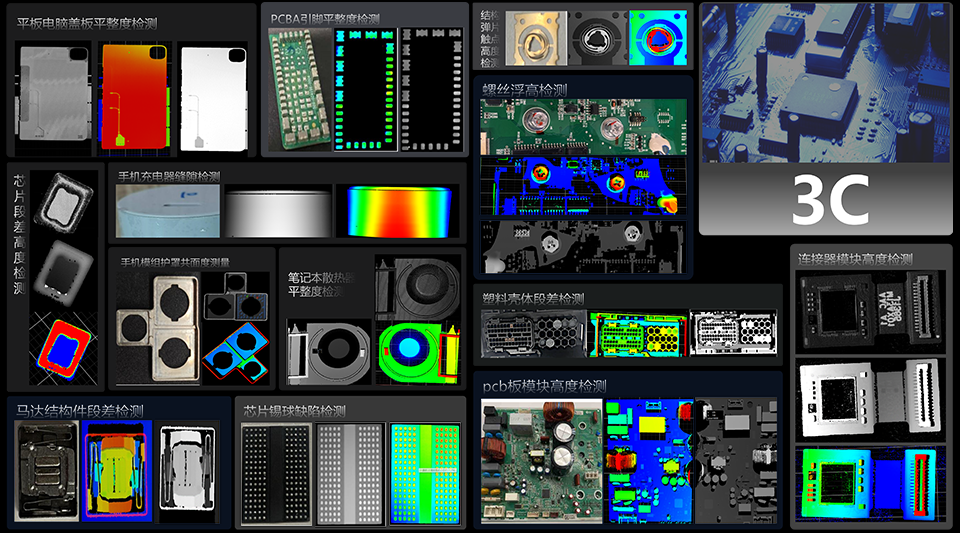
海康机器人3D激光轮廓传感器基于激光三角测量原理,通过硬件内置的高精度3D算法,实时输出高帧率、微米级精度的点云数据、深度图和亮度图数据,广泛适用于3C、锂电、汽配、光伏等行业中3D测量及检测场景。 海康机器人3D激光轮廓传感器目前已发布DP2000和DP3000两大系列。其中DP2000推出五款型号,单轮廓点数为2048点,最高采集频率达到10KHz,X轴测量范围25.2-720mm,Z轴重复精度0.4-24um,线性度±0.01% of MR,且DP2240和DP2470支持红蓝光两个版本选配。
DP3000系列推出六款型号,轮廓点数升级为3200点,最高检测频率提升到19KHz,在超高精度测量方向,进一步扩充了DP3020型号,覆盖11.5-14mm的X轴宽度,实现0.15um的Z轴重复精度,同时DP3300和DP3580两个版本同样支持红蓝光两个版本选配。